 AI
AI
 ChatGPT
ChatGPT
 Gemini
Gemini
 Thư viện Prompt
Thư viện Prompt
 Công nghệ
Công nghệ
 Học IT
Học IT
 Tiện ích
Tiện ích

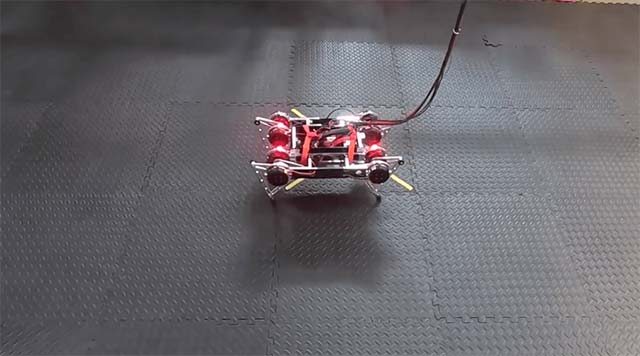
Trong một nghiên cứu mới được thực hiện gần đây tại Google, các kỹ sư đã thử sử dụng một một mô hình trí thông minh nhân tạo (AI) làm nền tảng để tạo ra một chú robot 4 chân có thể tự học được những cách di chuyển vô cùng tự nhiên mà không cần tới quá nhiều sự trợ giúp từ con người, chẳng hạn như tiến về phía trước, lùi lại, rẽ trái và phải. Ngoài ra, nó còn có thể tự học cách di chuyển chính xác trên 3 loại địa hình khác nhau, bao gồm mặt đất bằng phẳng, đệm mềm và tấm thảm chùi chân có kẽ hở.
Điều này nghe có vẻ đơn giản nhưng trên thực tế, rất khó để tự thiết kế các bộ điều khiển robot có thể xử lý các lệnh điều hướng đa dạng và phức tạp như vậy, đặc biệt là trên các loại địa hình khác nhau, nếu không có sự giúp sức từ AI. Vấn đề mấu chốt nằm ở chỗ robot có thể tự học và thích ứng với nhiều tình huống, thay vì luôn phải cần đến sự can thiệp từ con người trong từng bước.
Công nghệ AI được sử dụng trong dự án này có tên “deep reinforcement learning” (tạm dịch: học tập củng cố sâu), một cách tiếp cận dựa trên công nghệ học sâu (deep learning) lấy cảm hứng từ tâm lý học hành vi và “học thử” và “học lỗi”. Sức mạnh của công nghệ học tập củng cố sâu đã được chứng minh lần đầu vào năm 2013 khi DeepMind phát hành mô hình AI có thể tự học cách chơi tựa game Atari cổ điển mà không cần tới bất cứ hướng dẫn nào.
Trò chơi điện tử, hoặc ít nhất là các game mô phỏng, cũng thường được các nhà nghiên cứu robot tận dụng để đào tạo mô hình AI của mình. Nó tạo ra một môi trường lý thuyết tuyệt vời, cho phép các nhà nghiên cứu đào tạo robot của họ trong một thế giới ảo trước khi bước ra thế giới thực, giúp robot nhận biết và ghi nhớ những tình huống mà nó trải qua khi học cách thực hiện một nhiệm vụ cụ thể.
Bên cạnh đó, các nhà nghiên cứu của Google cũng đẩy mạnh phát triển những thuật toán cải tiến cho phép robot của họ có thể học nhanh hơn với ít sự thử nghiệm hơn.
Việc robot có thể tự học cách đi bộ trong 2 giờ có thể chưa phải kết quả gây sốc, nhưng nó cho thấy sự khác biệt rõ ràng về mặt hiệu quả so với việc các kỹ sư phải lập trình cụ thể cho từng thao tác, cách thức hoạt động của robot theo cách thủ công và vô cùng bị động như trước đây. Tuy nhiên những khó khăn mà đội ngũ Google gặp phải cũng là rất lớn.
“Mặc dù nhiều thuật toán học tập không giám sát hoặc học tập củng cố sâu đã được chứng minh trong mô phỏng, nhưng việc áp dụng chúng trên robot trong các thử nghiệm thực tiễn là không hề đơn giản. Đầu tiên, học củng cố sâu đòi hỏi lượng dự liệu đào tạo đầu vào rất lớn, và việc thu thập dữ liệu robot cũng rất tốn kém. Thứ hai, quá trình đào tạo đòi hỏi phải dành nhiều thời gian để giám sát robot. Nếu chúng ta cần một người giám sát robot và tự thiết lập lại nó mỗi khi nó vấp ngã - hàng trăm hoặc hàng ngàn lần - sẽ mất rất nhiều nỗ lực và thời gian để huấn luyện robot. Càng mất nhiều thời gian, việc mở rộng quy mô học tập cho robot trong nhiều môi trường khác nhau sẽ càng trở nên khó khăn”, Jie Tan, một trong những kỹ sư chủ chốt của dự án cho biết.
Trong tương lai, nghiên cứu này có thể giúp tạo ra những robot nhanh nhẹn hơn, có khả năng thích nghi nhanh hơn với các loại địa hình khác nhau. Tiềm năng ứng dụng là rất lớn, tuy nhiên dự án mới ở giai đoạn phát triển ban đầu và sẽ còn rất nhiều thách thứ cần phải vượt qua.








 Hướng dẫn AI
Hướng dẫn AI
 Ứng dụng
Ứng dụng
 Hệ thống
Hệ thống
 Game - Trò chơi
Game - Trò chơi
 iPhone
iPhone
 Android
Android
 Làng Công nghệ
Làng Công nghệ
 Hàm Excel
Hàm Excel
 Cuộc sống
Cuộc sống
 Khoa học
Khoa học