 AI
AI  ChatGPT
ChatGPT  Gemini
Gemini  Thư viện Prompt
Thư viện Prompt  Công nghệ
Công nghệ  Học IT
Học IT  Tiện ích
Tiện ích 
Nhà khoa học máy tính nổi tiếng của Đại học Maryland, Dinesh Manocha, mới đây đã phối hợp với một nhóm các kỹ sư công nghệ thông tin khác thuộc nhóm nghiên cứu Baidu Research và Đại học Hồng Kông, phát triển thành công một hệ thống mô phỏng hình ảnh thực tế (photo-realistic simulation system) để đào tạo và kiểm định mức độ an toàn cho các phương tiện giao thông tự hành. Theo đó, hệ thống mới này sẽ cung cấp một thế giới mô phỏng phong phú, và đặc biệt là chân thực hơn rất nhiều so với các hệ thống mô phỏng hiện tại, bằng cách sử dụng công cụ trò chơi hoặc đồ họa máy tính có độ chính xác cao, kết hợp với các dữ liệu kết xuất giao thông được hiển thị theo mô hình toán học.

Công nghệ mô phỏng mới này được gọi là Augmented Autonomous Driving Simulation (AADS), và được kỳ vọng sẽ có thể giúp tạo điều kiện cho các chuyên gia trong việc đánh giá mức độ an toàn của các hệ thống xe tự lái một cách dễ dàng hơn từ ngay trong môi trường phòng thí nghiệm, đồng thời đảm bảo sự tin cậy đến mức tối đa đối với những sản phẩm phương tiên giao thông không người lái trước khi chúng bắt đầu được thử nghiệm chính thức trên đường phố.
Các nhà khoa học đã mô tả phương pháp mà họ đã áp dụng thành công trong một bài báo nghiên cứu được xuất bản vào ngày 27 tháng 3 năm 2019 trên tạp chí Science Robotics.
"Dự án này của chúng tôi sẽ đại diện cho một mô hình mô phỏng giao thông mới mà qua đó, chúng ta có thể tiến hành kiểm tra độ tin cậy và an toàn của công nghệ xe tự hành một cách dễ dàng và chính xác hơn trước khi quyết định triển khai thử nghiệm trên đường cao tốc hoặc đường phố công cộng”, Dinesh Manocha, một trong những người chịu trách nhiệm cho công trình nghiên cứu, đồng thời là giáo sư về khoa học máy tính, kỹ thuật điện, và là chủ nhiệm Viện nghiên cứu máy tính nâng cao của Đại học Maryland chia sẻ.
Một trong những lợi ích tiềm năng hàng đầu của công nghệ xe tự lái là chúng có thể đảm nhiệm vai trò “tài xế” một cách hoàn hảo, không thua kém gì hoặc thậm chí còn tốt hơn so với con người, đặc biệt là khi những người lái xe “thực thụ” thường dễ bị phân tâm, mệt mỏi và cả các quyết định thiên về cảm xúc dẫn đến sai lầm và kết quả cuối cùng là một vụ tai nạn giao thông. Tuy nhiên, mọi chuyện không chỉ đơn giản như vậy. Để đảm bảo an toàn, các phương tiện tự hành phải trải qua quá trình thử nghiệm và đánh giá gắt gao mà không gặp phải bất cứ lỗi nào. Nói cách khác, với vô số tình huống khác nhau mà một chiếc xe có thể gặp phải trong lúc tham gia giao thông, hệ thống xe tự lái đòi hỏi phải đáp ứng được sự an toàn qua hàng trăm tiêu chí, hàng triệu dặm đường thử nghiệm, trong những điều kiện vô cùng khó khăn để chứng minh được độ tin cậy trong hoạt động thực tế.
Mặc dù về lý thuyết, để đạt được điều này, các nhà nghiên cứu có thể mất đến nhiều thập kỷ trong việc thực hiện những thử nghiệm trên đường phố, thế nhưng các đánh giá sơ bộ có thể được tiến hành nhanh chóng, hiệu quả và an toàn hơn thông qua những công nghệ mô phỏng giao thông dựa trên máy tính, có thể đại diện chính xác cho những tình huống xảy ra trong thế giới thực, cũng như mô hình hóa hành vi của các vật thể xung quanh.

AADS là một hệ thống điều khiển dữ liệu có thể đại diện một cách chính xác hơn cho các tình huống đầu vào mà một chiếc xe tự lái có thể sẽ phải đối mặt khi vận hành trên đường. Về cơ bản, một chiếc xe tự lái sẽ hoạt động dựa trên 2 hệ thống mô-đun. Trong đó, hệ thống mô-đun tri giác (perception module) sẽ có nhiệm vụ tiếp nhận cũng như giải mã thông tin thu được từ thế giới thực, và mô-đun điều hướng (navigation module) - bộ phận đóng vai trò đưa ra quyết định phù hợp, chẳng hạn như đánh lái về phía bên nào, có nên phanh hay tăng tốc... dựa trên thông tin thu được từ mô-đun tri giác.
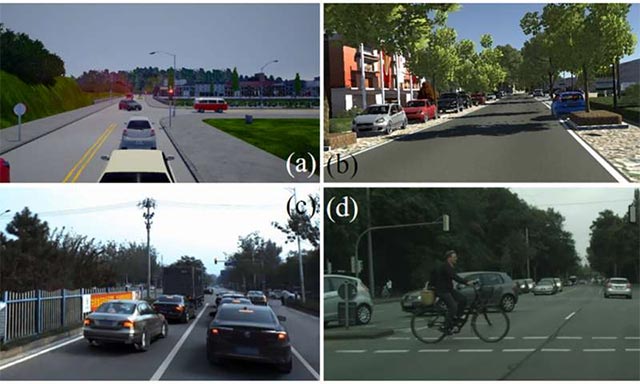
Trong thế giới thực, mô-đun tri giác của một chiếc xe tự lái thường thu nhận thông tin đầu vào thông qua hệ thống camera và cảm biến Lidar được lắp đặt xung quanh xe. Nếu bạn chưa biết thì Lidar là một phương pháp khảo sát đo khoảng cách tới mục tiêu bằng cách chiếu sáng mục tiêu đó bằng tia laze, sau đó đo các xung phản xạ bằng một cảm biến. Trong công nghệ mô phỏng hiện tại mới của giáo sư Dinesh Manocha và các cộng sự, mô-đun tri giác sẽ thụ nhận dữ liệu đầu vào từ hình ảnh do máy tính tạo ra thay vì từ thế giới thực, và các chuyển động sẽ được mô hình hóa bằng phương pháp toán học, đại diện cho các vật thể như người đi bộ, xe đạp và các loại phương tiện giao thông khác. Tất nhiên để làm được như vậy, các nhà nghiên cứu cũng đã phải dành ra rất nhiều thời gian cho việc tạo hình vì các mô hình hình ảnh cho máy tính phải được tạo hoàn toàn thủ công.
Hệ thống AADS kết hợp hình ảnh, video và công nghệ Lidar - giống như kết xuất hình dạng 3 chiều với dữ liệu mô phỏng quỹ đạo trong thế giới thực cho người đi bộ, xe đạp và các loại phương tiện khác. Những quỹ đạo này có thể được sử dụng để dự đoán hành vi lái xe và vị trí tiếp theo của các phương tiện hoặc người đi bộ trên đường để hệ thống tự lái đưa ra những quyết định điều hướng an toàn hơn.
"Chúng tôi đang cố gắng kết xuất và mô phỏng thế giới thực một cách trực quan, sử dụng kết hợp cả video và hình ảnh, từ đó nắm bắt hành vi và mô hình chuyển động thực sự. Thực tế mà nói thì cách thức con người lái xe hoàn toàn không dễ được nắm bắt cũng như mô phỏng bởi các mô hình toán học hay định luật vật lý chút nào, và đó thực sự là thách thức lớn. Vì vậy, chúng tôi đã trích xuất dữ liệu về quỹ đạo thực từ tất cả các video mà chúng tôi có, và sau đó mô hình hóa những hành vi lái xe bằng phương pháp khoa học xã hội. Cách tiếp cận dựa trên dữ liệu này đã cho phép chúng tôi tạo nên một trình giả lập hành vi giao thông thực tế với độ chính xác cực cao”, giáo sư Dinesh Manocha chia sẻ.
Công bằng mà nói thì các nhà khoa học đã phải đối mặt với một thách thức lâu dài cần phải vượt qua trong việc sử dụng dữ liệu hình ảnh và video thực tế để tạo lập nên các mô phỏng của họ: Mọi cảnh đều phải phản ứng với chuyển động của chiếc xe tự lái, mặc dù những chuyển động đó có thể không được chụp bởi máy ảnh gốc hoặc cảm biến Lidar. Bên cạnh đó, bất kỳ góc hoặc cảnh nào không được chụp ảnh hoặc quay video đều phải được hiển thị hoặc mô phỏng bằng các phương pháp dự đoán. Đây chính là lý do tại sao mà công nghệ mô phỏng luôn phải phụ thuộc rất nhiều vào đồ họa do máy tính cung cấp, và đồng thời cả các kỹ thuật dự đoán dựa trên vật lý.

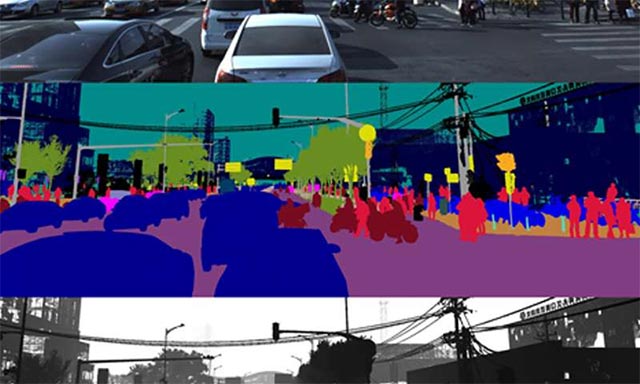
Để vượt qua những thách thức này, các nhà nghiên cứu đã phát triển công nghệ cho phép cô lập nhiều thành phần khác nhau của những cảnh vật trên đường phố trong thế giới thực, và sau đó biến chúng thành các yếu tố riêng lẻ có thể được ghép lại để tạo ra vô số kịch bản lái xe thực tế khác nhau.
Với công nghệ AADS, xe cộ và người đi bộ có thể được “gắp ra” từ một môi trường và đặt vào môi trường khác với các phương thức di chuyển và điều kiện ánh sáng, môi trường thích hợp. Bên cạnh đó, đường phố có thể được thiết kế lại với nhiều cấp độ giao thông khác nhau. Sự đa dạng trong góc nhìn của mỗi cảnh sẽ cung cấp nhiều khía cạnh thực tế hơn trong việc thay đổi làn đường và ngã rẽ. Ngoài ra, công nghệ xử lý hình ảnh tiên tiến cũng cho phép quá trình chuyển tiếp diễn ra mượt mà, và đồng thời giúp giảm sự biến dạng của các mô hình so với những kỹ thuật mô phỏng video thông thường. Mặt khác các kỹ thuật xử lý hình ảnh cũng được sử dụng để trích xuất quỹ đạo và từ đó, giúp mô hình hóa hành vi của người lái xe.
"Vì đang sử dụng video và cả các chuyển động trong thế giới thực, do đó mô-đun tri giác của chúng tôi sẽ sở hữu thông tin chính xác hơn nhiều so với các phương pháp được sử dụng trước đây. Và sau đó, do tính thực tế của trình giả lập, chúng tôi có thể đánh giá một cách hiệu quả hơn những quyết định điều hướng của hệ thống lái tự động”, giáo sư Dinesh Manocha chia sẻ thêm.

Bên cạnh đó, giáo sư Dinesh Manocha cũng cho biết rằng thông qua việc cho ra mắt công nghệ này, các nhà khoa học cũng hy vọng một số tập đoàn đang triển khai các dự án phát triển phương tiện tự hành có thể kết hợp giữa cách tiếp cận dựa trên dữ liệu và công nghệ mô phỏng mới để cải thiện trình mô phỏng của chính họ, qua đó giúp thử nghiệm và đánh giá hệ thống lái tự động một cách chính xác hơn.
















 AI
AI  Hướng dẫn AI
Hướng dẫn AI  Ứng dụng
Ứng dụng  Hệ thống
Hệ thống  Game - Trò chơi
Game - Trò chơi  iPhone
iPhone  Android
Android  Hàm Excel
Hàm Excel  Download
Download  Khoa học
Khoa học  Cuộc sống
Cuộc sống  Làng Công nghệ
Làng Công nghệ